최근 기업과 연구소에서 자율주행 기술 개발이 한창이다. 인간에게 편의를 제공하고 교통사고를 줄일 수 있기 때문이다. 관련 업계 종사자들은 자율주행자동차의 역사가 빠르면 2020년부터 시작될 것으로 예측한다. 과연 이들은 어떤 기술을 이용해 자율주행을 가능케 할까?
스스로 판단하고 제어하는 자동차
자율주행자동차란 임의의 목적지가 주어지면 탑승자의 개입 없이 목적지까지 알아서 운전하는 자동차이다. 스스로 주변 환경을 인식하고 주행 상황을 판단한 후 자동차를 제어하기 때문에 가능한 것이다. 이를 통해 운전자보다 도로 상황을 빠르게 인식해 교통사고를 줄일 수 있으며, 교통 체증 등이 발생하지 않아 연료를 절약할 수 있다.
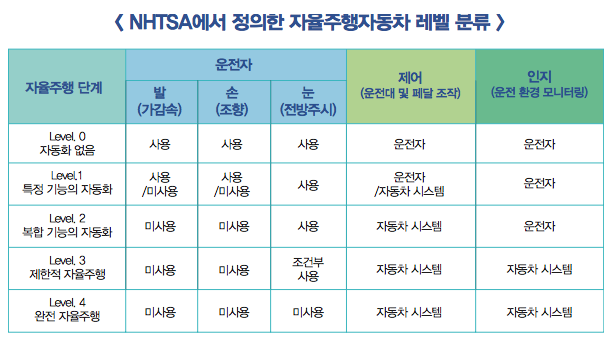
컴퓨터의 판단 기술이 진화하면서 자율주행자동차는 단계별로 발달해 왔다. <미국도로교통안전국(NHTSA)>은 자율주행자동차의 기능을 크게 5단계로 구분했다. 현재 자동차에 구현된 운전자 보조 시스템(Advanced Driver’s Assistant System, ADAS)은 1~2단계 수준으로 운전자에게 일부 제어 기능을 지원하고 자동차의 핸들을 통해 저속을 가능하도록 한다. 3단계부터는 자동차가 주변 환경을 직접 파악해 운행하는 것으로 주행 환경에 대한 고정밀 인식 등의 기술이 필요하다.
사고 방지를 위해
자율주행자동차에는 크게 △주행 위치 인식 △주행 환경 인식 △주행 경로 판단 및 제어하는 알고리즘이 있다. 이런 알고리즘은 △센서 기술 △정밀 지도 △통신 및 네트워크 기술 △인공지능 기술을 필요로 한다.
먼저 위치 인식을 위한 센서와 주행 환경에 존재하는 물체를 인식하기 위한 센서로 구성돼 있다. 그 예로는 △스테레오 카메라 △레이더 △라이다(LiDAR) 등이다. 스테레오 카메라는 영상을 통해 △전방충돌방지 △차선이탈방지 △사각지대 감지 △주차지원 등의 기능을 구현한다. 레이더는 물체 인지 거리가 멀어 어두운 밤이나 폭우 등 기상이 좋지 않을 때도 주행 환경을 인지할 수 있도록 한다. 라이다는 주행 중인 자동차와 앞 자동차 간의 충돌을 피하고, 충돌 시에는 충격을 최소화하는 역할을 한다. 이와 동시에 정밀 지도 기술이 필요하다. 자율주행자동차를 구현하기 위해서는 오차가 20㎝ 이하의 지도가 있어야 하는데, 현재 GPS 기술로는 그 정확도를 얻을 수 없기 때문이다.
통신 및 네트워크 기술을 통해 주행 환경 인식과 주행 경로 판단이 가능하다. 주행 자동차가 △주변 자동차 △도로 인프라 △보행자 △네트워크 간의 실시간 커뮤니케이션으로 경로상 필요한 정보를 얻을 수 있다. 이를 V2X(Vehicle to Everything communication) 기술이라 일컫는다.
일반적으로 주행 경로를 생성하는데, 인공지능이 활용된다. 컴퓨터가 사람처럼 생각하고 배워나가는 딥 러닝(Deep Learning) 기술이 대표적이다. 이 기술에는 A* 알고리즘 등이 적용되는데, 인공지능이 주어진 출발점부터 목표 지점까지 가는 최단 경로를 찾아내는 것이다.
이 모든 기술은 ‘사고 방지’가 궁극적인 목표임을 전제한다. 자동차의 안전 시스템은 과거 에어백, 안전벨트와 같이 자동차 사고 이후에 탑승자의 충격을 줄여주는 수동안전 시스템이었다면, 지금은 인공지능, 로봇 기술들의 발달에 따른 능동 안전 시스템을 중심으로 이동하고 있다. 관련 분야를 연구 중인 백윤주(전기컴퓨터공학) 교수는 “영화 속 자율주행 기술이 결코 허황된 꿈이 아니다”라며 “빠른 시일 내에 자율주행이 가능해질 것이라고 낙관적으로 바라본다”라고 말했다.